We introduce LookUp3D, a method that enables, for the first time, 3D scanning at 450 frames per second at 1 Megapixel, or 1,450 frames per second at 0.4 Megapixel in an environment with controlled lighting. The key idea is to use a per-pixel lookup table that maps colors to depths, which is built using a linear stage. Imperfections, such as lens-distortion and sensor defects are baked into the calibration. We describe our method and test it on a novel hardware prototype. Our results show the system acquiring geometry of objects undergoing high-speed deformations and oscillations and demonstrate the ability to recover physical properties from the reconstructions.

The goal of calibration is to create the unique dictionary between depth and color for each pixel . Our calibration procedure uses a planar calibration target (filled with fiduciary markers) moved by an off-the-shelf linear stage. We project a fixed pattern sequence onto the calibration target and record, per-pixel, the color reading and the depth measurement.
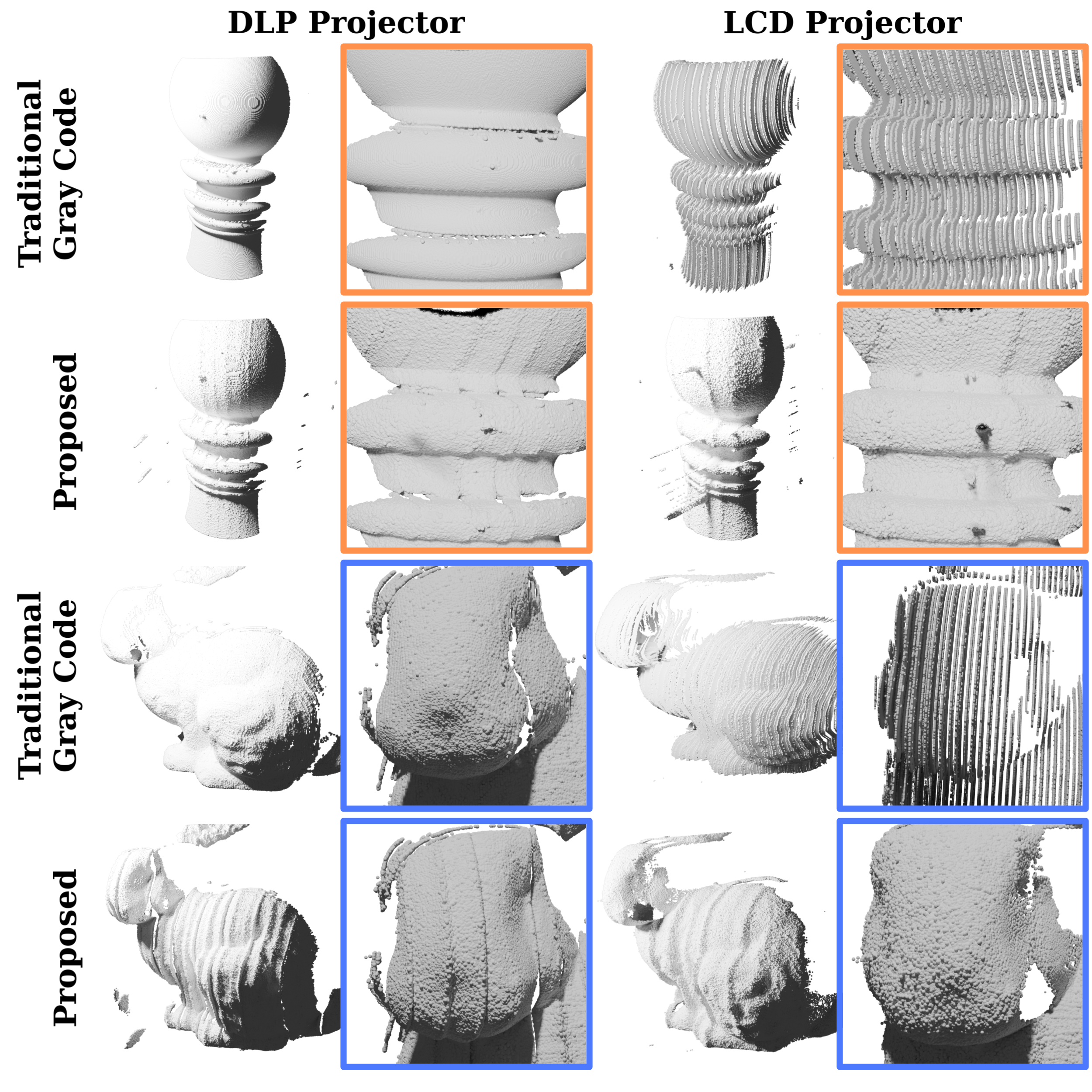
We deviate from traditional structured light: to recover depth, we rely solely on the calibration board and the linear stage, without the need to model the projector defocusing, vignetting, intrinsic and extrinsic parameters. We test this hypothesis with a set-up where the quality of the optics of the projector does not alter the results achieved by LookUp3D, whereas a traditional structured light method reliant on triangulation suffers a lot in quality of reconstruction.
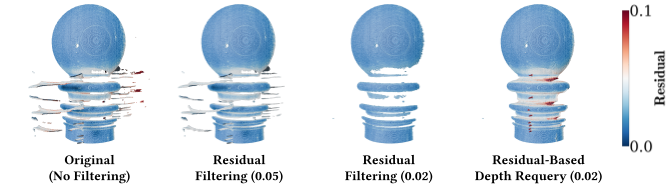
The scanning procedure is as follows: we project the same fixed pattern sequence from calibratioon now onto an object of unknown geometry and capture an image of intensity . Reconstruction compares each pixel in the measured color image with the calibrated per-pixel lookup table. In its unoptimized form, the operation is a simple, embarrassingly parallel lookup to find the depth whose color is closest to the observed pixel , or where the search is done offline on a discrete set of depths. The residual provides a per-pixel confidence measure that can be thresholded to filter unreliable points.
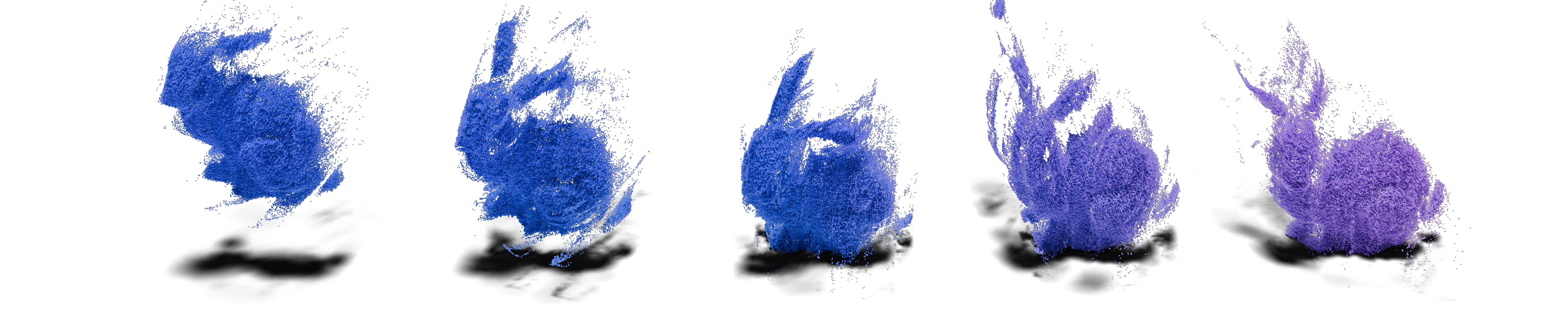
We validate LookUp3D across three hardware configurations: a standard DLP projector, an inexpensive LCD projector, and a custom-built analog projector for high-speed. With the high-speed prototype, we achieve accurate reconstructions at 450 fps and 1 Megapixel resolution. We recover the free-fall of a bunny at 450 fps with relative motion errors below 2%.
LookUp3D achieves reconstruction quality comparable to traditional structured light with the DLP projector, and significantly outperforms it with the LCD projector. While the quality of traditional Gray Code reconstruction deteriorates significantly with the low-quality projector -- due to its reliance on accurate triangulation -- LookUp3D remains robust.
We show below a chess board, a paint brush, a 3D-printed house, and a monkey statue, all reconstructed with 11 channels. These scenes were captured with our DLP Projector with ceiling lights on.

Since we do not need to explicitly model the projector for scanning, we use a custom analog projector that can flicker LEDs at frequencies above 1kHz. We expose a pattern onto a 35-mm color film slide, develop it, and place in front of one of the LEDs, allowing the projection of an RGB patterm at extremely high frequencies. We can then 3D scan slow-motion scenes.
@inproceedings{10.1145/3757377.3763986,
author = {Pereira, Giancarlo and Gao, Yidan and Piadyk, Yurii and Fouhey, David and Silva, Claudio T and Panozzo, Daniele},
title = {LookUp3D: Data-Driven 3D Scanning},
year = {2025},
isbn = {9798400721373},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3757377.3763986},
doi = {10.1145/3757377.3763986},
booktitle = {Proceedings of the SIGGRAPH Asia 2025 Conference Papers},
articleno = {149},
numpages = {11},
keywords = {3D Scanning, Geometry Acquisition, Structured Light, Data-Driven, Active Illumination, High-Speed},
location = {
},
series = {SA Conference Papers '25}
}